Elektrisch
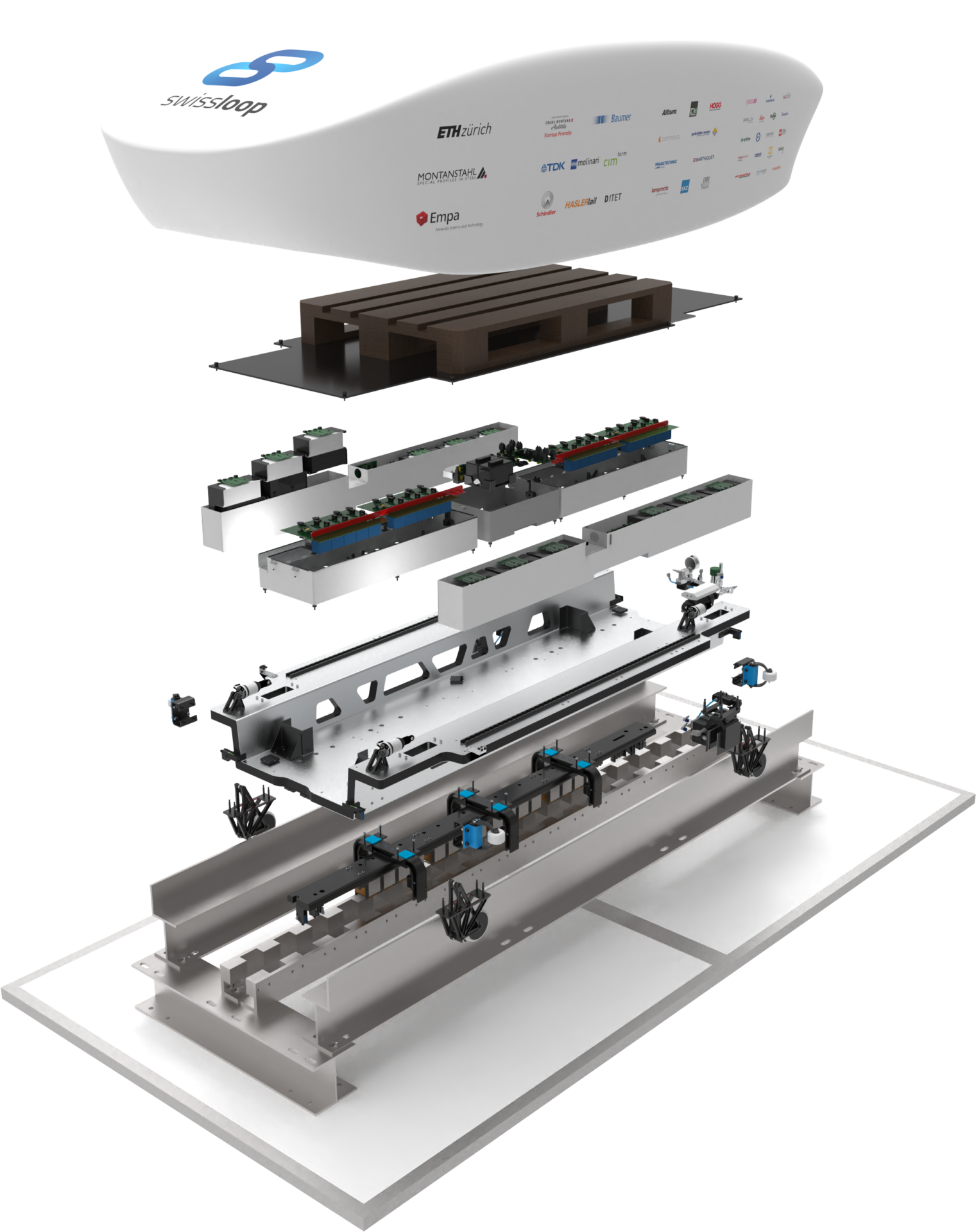
Der linear geschaltete Reluktanzmotor (LSRM) beschleunigt das Fahrzeug, indem er einen gepulsten Gleichstrom durch die Spulen des Motors schaltet. Wenn dies an der richtigen Position auf der Strecke geschieht, wird der Pod immer von den weiter vorne gelegenen Zähnen angezogen, was zu einer kontinuierlichen Vorwärtsbewegung führt. Der Motor besteht aus sechzehn Spulen mit einem Kern aus Elektroblech und ist an der Unterseite des Chassis montiert, um einen niedrigen Schwerpunkt zu erzielen. Der Wechselrichter stellt das Bindeglied zwischen den Batterien und dem LSRM dar und regelt den Strom für den Motor.
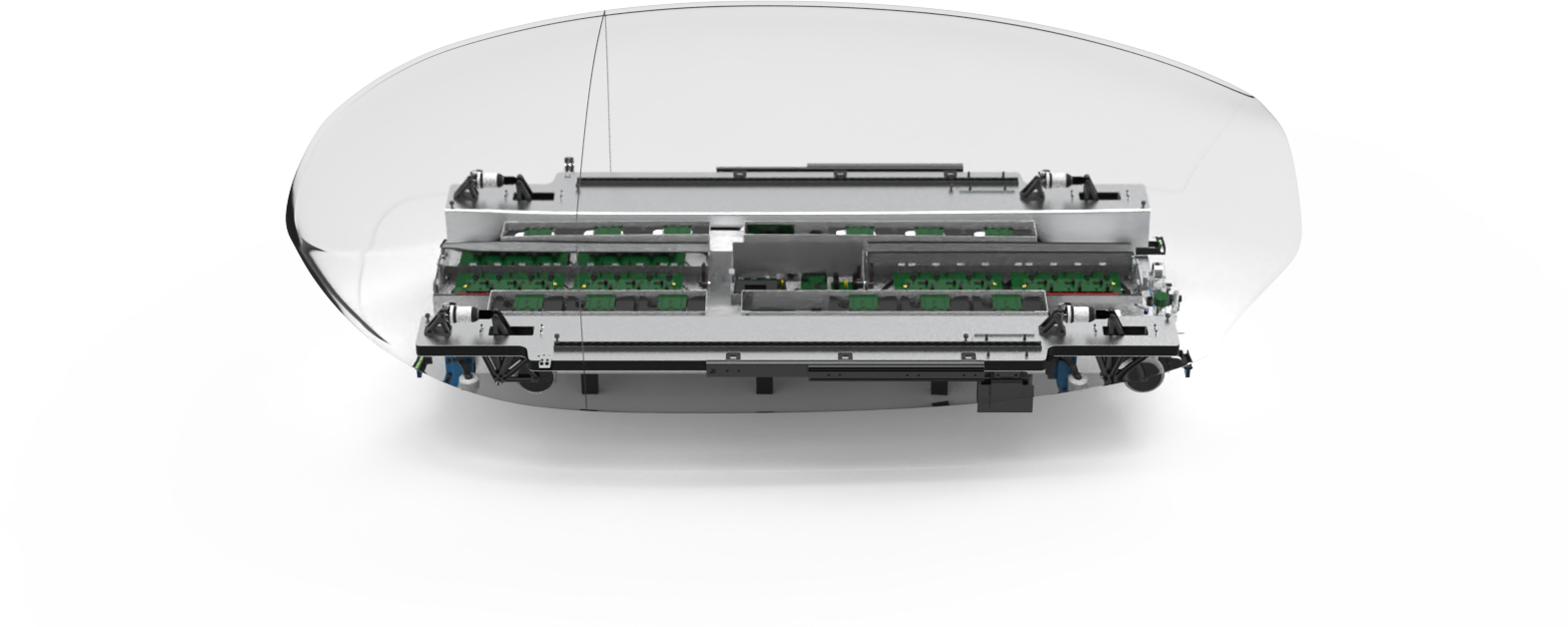
Die elektrischen Systeme sind dabei grösstenteils in zwei Hochspannungs- und eine Niederspannungsbox aufgeteilt. Die Hochspannungsboxen enthalten jeweils zwei Leistungsmodule und sind vorne und hinten im Fahrzeug platziert. Analog dazu, enthält die Niederspannungsbox die Fahrzeug- und Umrichtersteuerung sowie die Niederspannungsversorgung und befindet sich in der Mitte des Pods. Ähnlich verhält es sich mit den Batterien, welche in zwei Batterieboxen, eine auf jeder Seite des Prototyps, integriert sind. Das gesamte Batteriesystem besteht aus 24 Lithium-Polymer-Akkupacks und hat eine Nennspannung von 400 V. Diese Boxen enthalten zusätzliche Elektronik, darunter das Batterie-Management-System (BMS), welches für die Überwachung jeder einzelnen Zelle zuständig ist.
Weiter ist die Fahrzeugsteuerung für die digitale Integration des Pods zuständig. Dazu gehört die Erfassung von Daten aus den anderen Systemen und die Ermittlung des Zustands des Gesamtfahrzeugs über die verschiedenen Sensoren, die über einen der CAN-FD-Bus angeschlossen sind. Die Fahrzeugsteuerung ergreift dann Massnahmen auf der Grundlage dieser gesammelten Daten. Zudem stellt sie eine drahtlose Verbindung zur Steuersoftware her, von wo aus manuelle Steuerbefehle gesendet werden können.
Mechanisch
Das Fahrgestell bildet das strukturelle Gerüst des Fahrzeugs. Als solches muss es den einwirkenden Belastungen standhalten und wurde aus einer Aluminium und Schaumstoff Sandwich-Struktur gefertigt. Zusätzlich deckt eine aus Verschalung aus kohlefaserverstärkten Kunststoff den Prototypen und die Fracht ab und verbessert das aerodynamische Verhalten. Das am Fahrgestell angebrachte Aufhängungs- und Stabilitätssystem stellt den physischen Kontakt zwischen dem Fahrzeug und der Schiene her. Es sorgt nicht nur dafür, dass der Pod auf der gewünschten Strecke fährt, sondern dient auch als Schutz vor Stössen aufgrund von Unebenheiten in der Strecke. Es besteht aus vier Räderpaaren, die vertikale und seitliche Bewegung des Fahrgestells begrenzen, und drei zusätzlichen Räderpaaren, welche unabhängig vom Rest die seitliche Bewegung des Motors begrenzen. Für die Aufhängung des Fahrgestells wurden Mountainbike-Stossdämpfer für die vertikale und Gummidrehfedern für die seitliche Aufhängung verwendet, während der Motor starr stabilisiert wird.
Weiter sorgen die Bremsen dafür, dass das Fahrzeug auf in allen Fällen sicher zum Stillstand kommen kann. Der Bremsmechanismus wird mithilfe eines pneumatischen Systems gesteuert, welches die erforderliche Bremsenergie bereitstellt. Die Bremskraft wird durch einen Pneumatikzylinder erzeugt, der die Bremsklötze auf die Schiene drückt, sodass der Pod durch mechanische Reibung gebremst wird. Das System ist redundant aufgebaut und auch bei unerwarteten Ausfällen kann immer eine ausreichende Bremskraft gewährleistet werden. Die als Redundanz verwendeten Tellerfedern sind ständig komprimiert und werden auch ohne Strom- und Luftzufuhr ausgelöst. Zusätzlich kann die Bremskraft über einen einstellbaren Druckregler im pneumatischen System reguliert werden.