Elektrisch
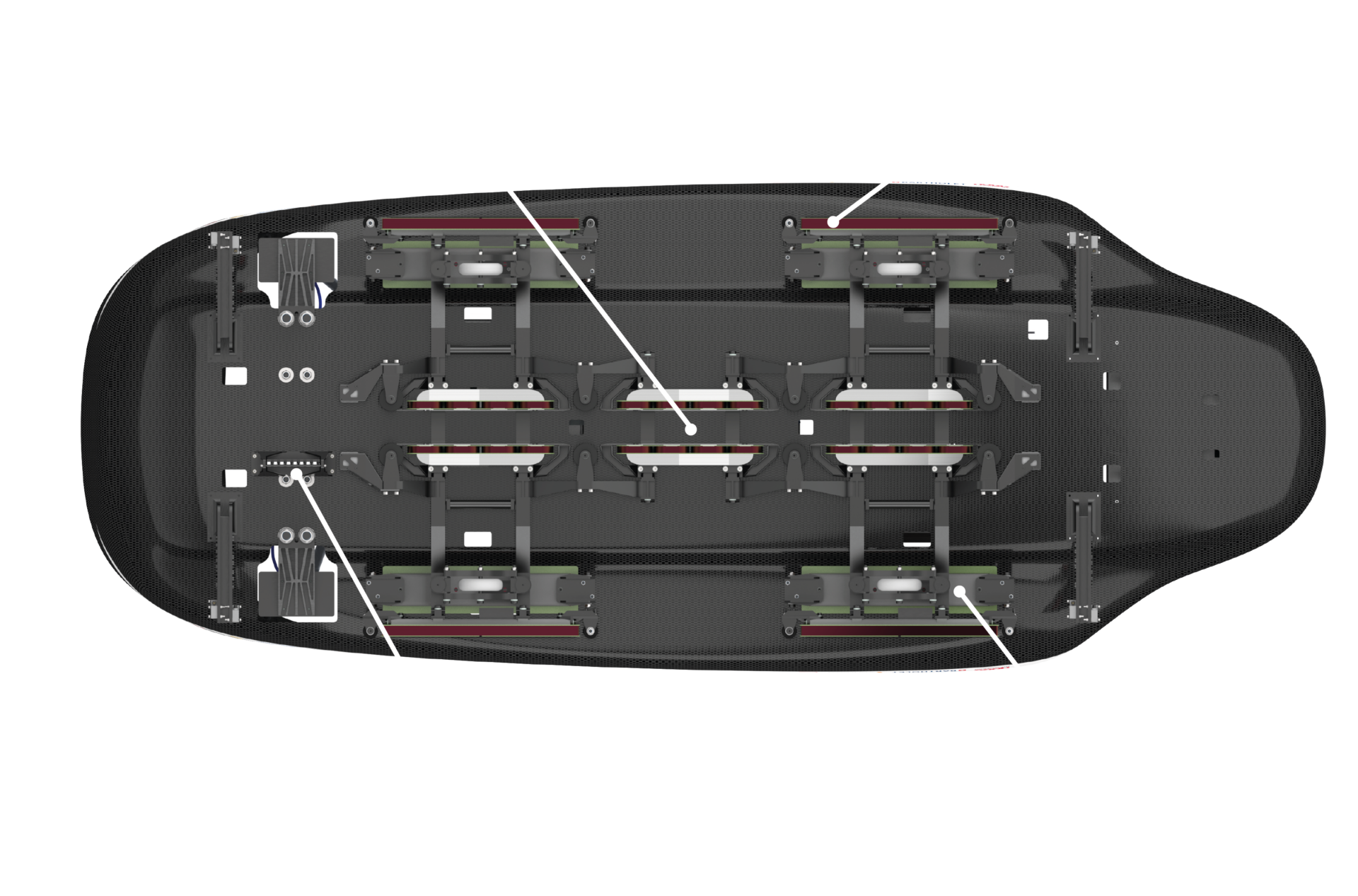
Der linear geschaltete Reluktanzmotor (LSRM) beschleunigt das Fahrzeug, indem er einen gepulsten Gleichstrom durch die Spulen des Motors schaltet. Wenn dies an der richtigen Position auf der Strecke geschieht, wird die Pod immer von den weiter vorne liegenden Zähnen angezogen, was zu einer kontinuierlichen Vorwärtsbewegung führt. Der Motor besteht aus 24 Spulen mit einem laminierten Kern und ist an der Unterseite des Monocoques montiert, um einen niedrigen Schwerpunkt zu erreichen. Der Wechselrichter ist das Bindeglied zwischen den Batterien und dem LSRM und regelt den Strom durch den Motor.
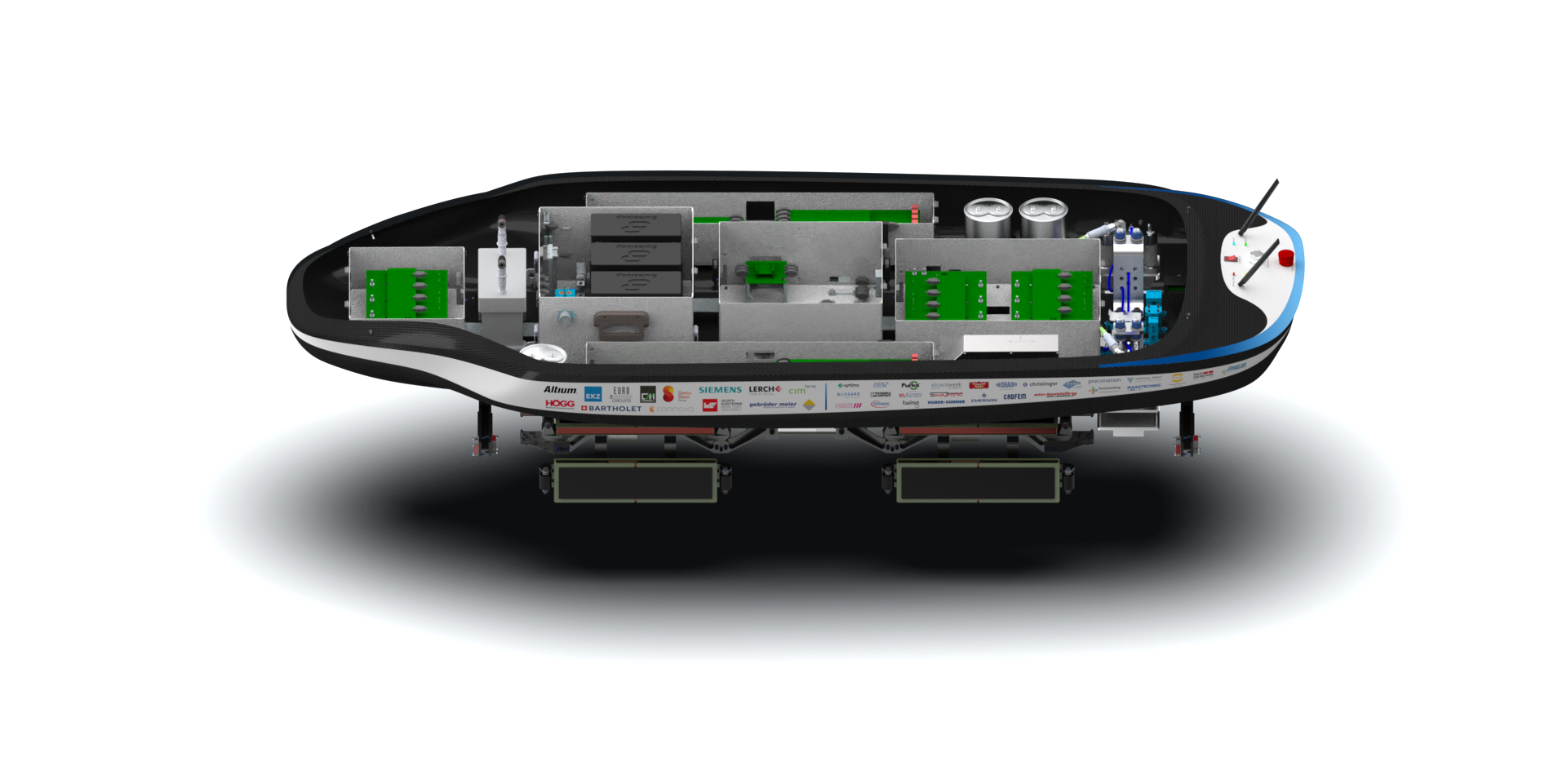
Die elektrischen Systeme sind im Wesentlichen in fünf Hochspannungs- und eine Niederspannungsbox unterteilt. Die Hochspannungsboxen enthalten insgesamt drei Leistungsmodule für das Antriebssystem und vier Leistungsmodule für das Schwebe- und Führungssystem. Jedes Antriebswechselrichtermodul steuert zwei Phasen des LSRM, das aus vier seriellen Spulen, die mit bis zu 150 A angesteuert werden, was zu Beschleunigungen von bis zu 1,6 g führt. Gleichzeitig steuert jedes Leistungsmodul für das Führungs- und das Schwebesystem eine elektromagnetische Aufhängung (EMS) für die seitliche Stabilisierung und eine hybride elektromagnetische Aufhängung (HEMS) für das vertikale Schweben an. Diese Spulen werden im Bereich von -20 A bis 20 A erregt und halten das Fahrzeug innerhalb eines Abstands von 0 bis 9 mm bzw. 5,5-17.5 mm zur Schiene für die EMS bzw. HEMS. Alle Stromregler verwenden einen toleranzbandbasierten Regler, der auf einem FPGA läuft, während der Positions- und Geschwindigkeitsregler auf STM32H7-Mikrocontrollern läuft.
Die Niederspannungsbox enthält die Fahrzeug-, Schwebe- und Antriebswechselrichtersteuerung sowie die Niederspannungsstromversorgung und befindet sich in der Mitte des Fahrzeugs. Die Batterien sind in einer Batteriebox vor der Niederspannungsbox integriert. Das gesamte Batteriesystem besteht aus bis zu 24 Lithium-Polymer-Batteriepaketen und hat eine maximale Spannung von 800 V. Diese Box enthält zusätzliche Elektronik, darunter das Batteriemanagementsystem (BMS), das für die Überwachung jeder einzelnen Batteriezelle zuständig ist, und ein Isolationsüberwachungsgerät (IMD), das die ordnungsgemässe Trennung der verschiedenen Potenziale gewährleistet.
Darüber hinaus ist das Fahrzeugsteuergerät für die digitale Integration des Pods zuständig. Dazu gehört das Sammeln von Daten aus den anderen Systemen und die Bestimmung des Gesamtzustands des Fahrzeugs über die verschiedenen, an einen der CAN-FD-Busse angeschlossenen Sensoren. Das Fahrzeugkontrollsystem ergreift dann Massnahmen auf der Grundlage dieser gesammelten Daten. Ausserdem stellt es eine drahtlose Verbindung zur Steuerungssoftware her, von der aus manuelle Steuerbefehle gesendet werden können.
Mechanisch
Das Fahrgestell ist komplett neu als Kohlefaser-Monocoque konzipiert. Dieses innovative Design sorgt dafür, dass alle Kräfte durch die vakuumtaugliche Kohlefaser-Sandwichstruktur sowie das darunter liegende Aluminiumskelett geleitet werden. Mit einem Gewicht von nur 21 kg bietet das Monocoque-Fahrgestell mit seinem Deckel eine aussergewöhnliche aerodynamische Leistung und ein futuristisches Aussehen. Der Pod verfügt über ein fortschrittliches Schwebe- und Führungssystem, das sowohl seitliche als auch vertikale Stabilität gewährleistet. Um die Sicherheit zu erhöhen, wurde eine neue Generation von Fahrwerkssystemen integriert, die vor Ausfällen des Schwebesystems schützen und Schienenversatz ausgleichen. Das System umfasst vier Räder, die die vertikale Bewegung des Pods begrenzen, während zahlreiche vertikale und seitliche Führungsräder als erste Kontaktpunkte in alle Richtungen dienen.
Sicherheit ist von höchster Wichtigkeit, daher wurden die Bremsen des Pods so konstruiert, dass sie in allen Szenarien eine zuverlässige Bremskraft gewährleisten und eine Abbremsung von bis mit 2,1 g ermöglichen. Ein pneumatisch betätigter Bremsmechanismus erzeugt die nötige Bremskraft, und eine redundante Konstruktion garantiert die Sicherstellung einer ausreichenden Bremskraft auch unter unvorhergesehenen Umständen. Tellerfedern, die ständig komprimiert werden und sich auch ohne Strom- oder Luftzufuhr lösen können, sorgen für zusätzliche Redundanz. Ein weiteres Highlight dieses Prototyps sind die innovativen Energierückgewinnungsmöglichkeiten. Der Pod verfügt über eine Motorarchitektur, welche die Rückgewinnung von Energie unterstützt und somit das mechanische Bremssystem ergänzt. Zusammen mit der eigens entwickelten Elektronik, ist der Pod in der Lage, über den Motor mechanische Energie zu rekuperieren.
Um die Kühlung der elektrischen Komponenten zu gewährleisten, wurde ein hochmodernes, vakuumtaugliches Kühlsystem entwickelt. Dieses System nutzt einen eigens entwickelten Wasserkreislauf, um die Wärme der Leistungselektronik effizient an einen zentralen thermischen Phasenwechsel-Speicher zu übertragen. Dieser revolutionäre 3D-gedruckte Wärmespeicher aus Metall verwendet eine speziell abgestimmte Paraffin Mischung, um grosse Mengen an Wärmeenergie zu speichern. Wenn der Pod zum Stillstand kommt, kann die Wärmebatterie einfach und sehr schnell ausgetauscht werden, um die optimale Kühlleistung wiederherzustellen.