Electrical
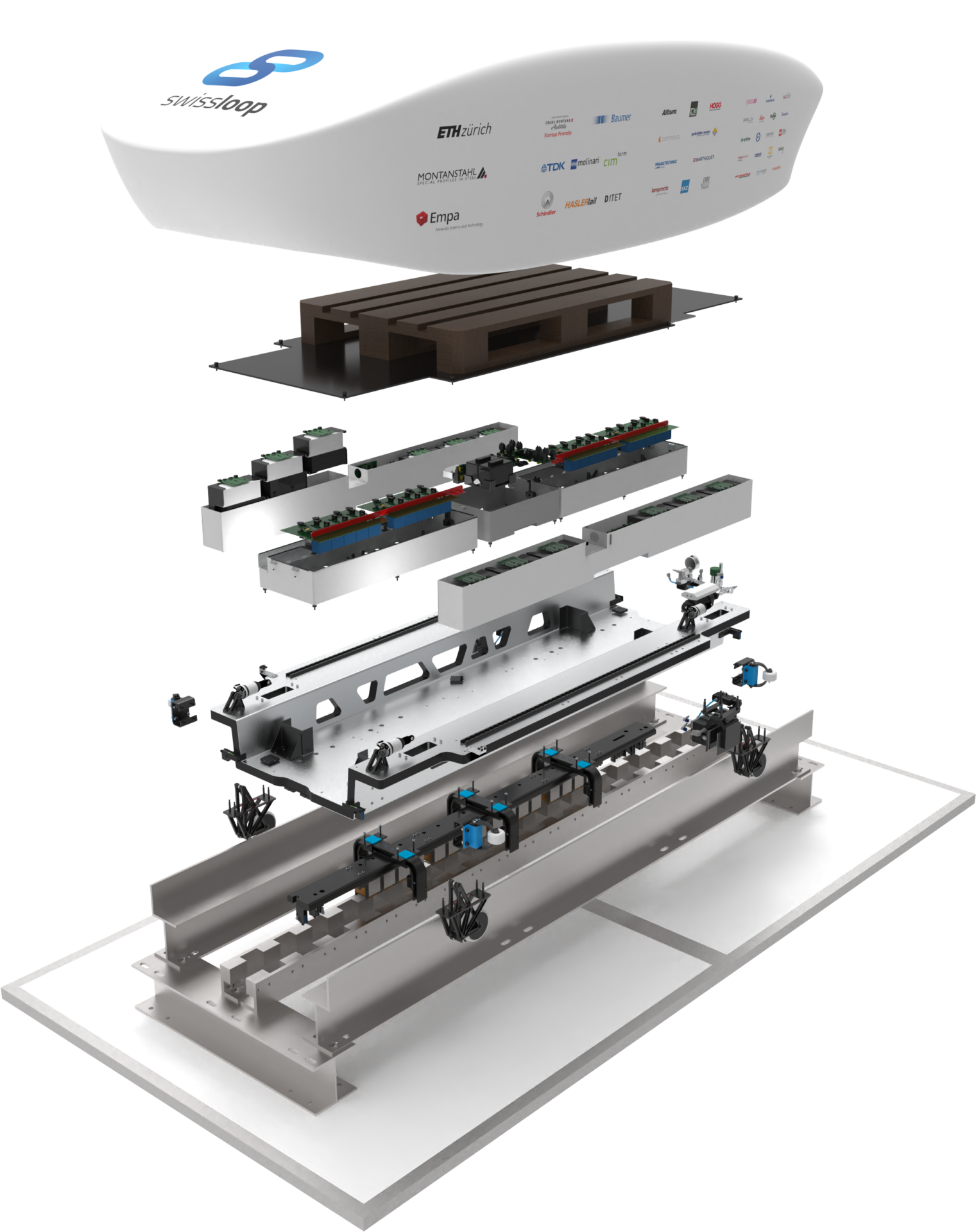
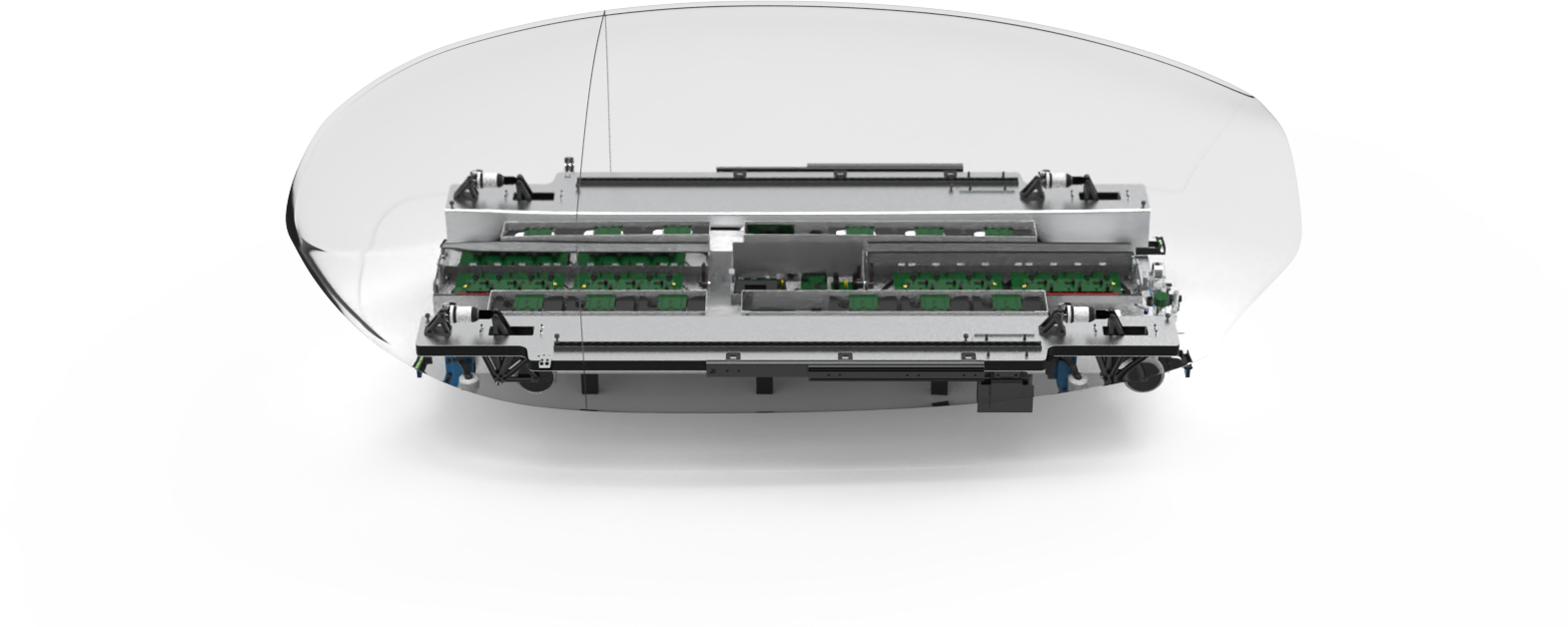
The linear switched reluctance motor (LSRM) accelerates the vehicle by switching a pulsed direct current through the coils of the motor. When this happens at the right position on the track, the pod is always attracted to the teeth further forward, resulting in continuous forward motion. The motor consists of sixteen coils with a laminated core and is mounted on the underside of the chassis to achieve a low center of gravity. The inverter is the link between the batteries and the LSRM and regulates the current through the motor.
The electrical systems are largely divided into two high-voltage and one low-voltage box. The high-voltage boxes each contain two power modules and are placed at the front and rear of the vehicle. The low-voltage box contains the vehicle and inverter controls as well as the low-voltage power supply and is located in the middle of the pod. The batteries are integrated into two battery boxes, one on each side of the prototype. The entire battery system consists of 24 lithium-polymer battery packs and has a nominal voltage of 400 V. These boxes contain additional electronics, including the battery management system (BMS), which is responsible for monitoring each individual battery cell.
Further, the vehicle controller is responsible for the digital integration of the pod. This includes collecting data from the other systems and determining the state of the overall vehicle via the various sensors connected to one of the CAN-FD buses. The vehicle control system then takes action based on this collected data. It also establishes a wireless connection to the control software, from where manual control commands can be sent.
Mechanical
The chassis forms the structural framework of the vehicle. As such, it must withstand the forces applied to it and is made of an aluminum and foam sandwich structure. In addition, a carbon fiber reinforced plastic shell covers the prototype and cargo and improves aerodynamic performance. The suspension and stability system attached to the chassis provides the physical contact between the vehicle and the track. It not only ensures that the pod travels on the desired track, but also serves as protection against impacts due to bumps in the track. It consists of four pairs of wheels that limit the vertical and lateral movement of the chassis, and three additional pairs of wheels that limit the lateral movement of the motor independently of the rest of the pod. For the suspension of the chassis, mountain bike shock absorbers were used for the vertical suspension, and rubber torsion springs for the lateral suspension, while the motor is rigidly stabilized.
Furthermore, the brakes ensure that the vehicle can come to a safe stop in all cases. The braking mechanism is controlled by a pneumatic system that provides the necessary braking energy. The braking force is generated by a pneumatic cylinder that presses the brake blocks onto the rail so that the pod is decelerated by mechanical friction. The system has a redundant design and sufficient braking force can always be guaranteed even in the event of unexpected failures. The disc springs used as redundancy are constantly compressed and are released even without power or air supply. In addition, the braking force can be regulated via a software controlled pressure regulator in the pneumatic system.