Electrical
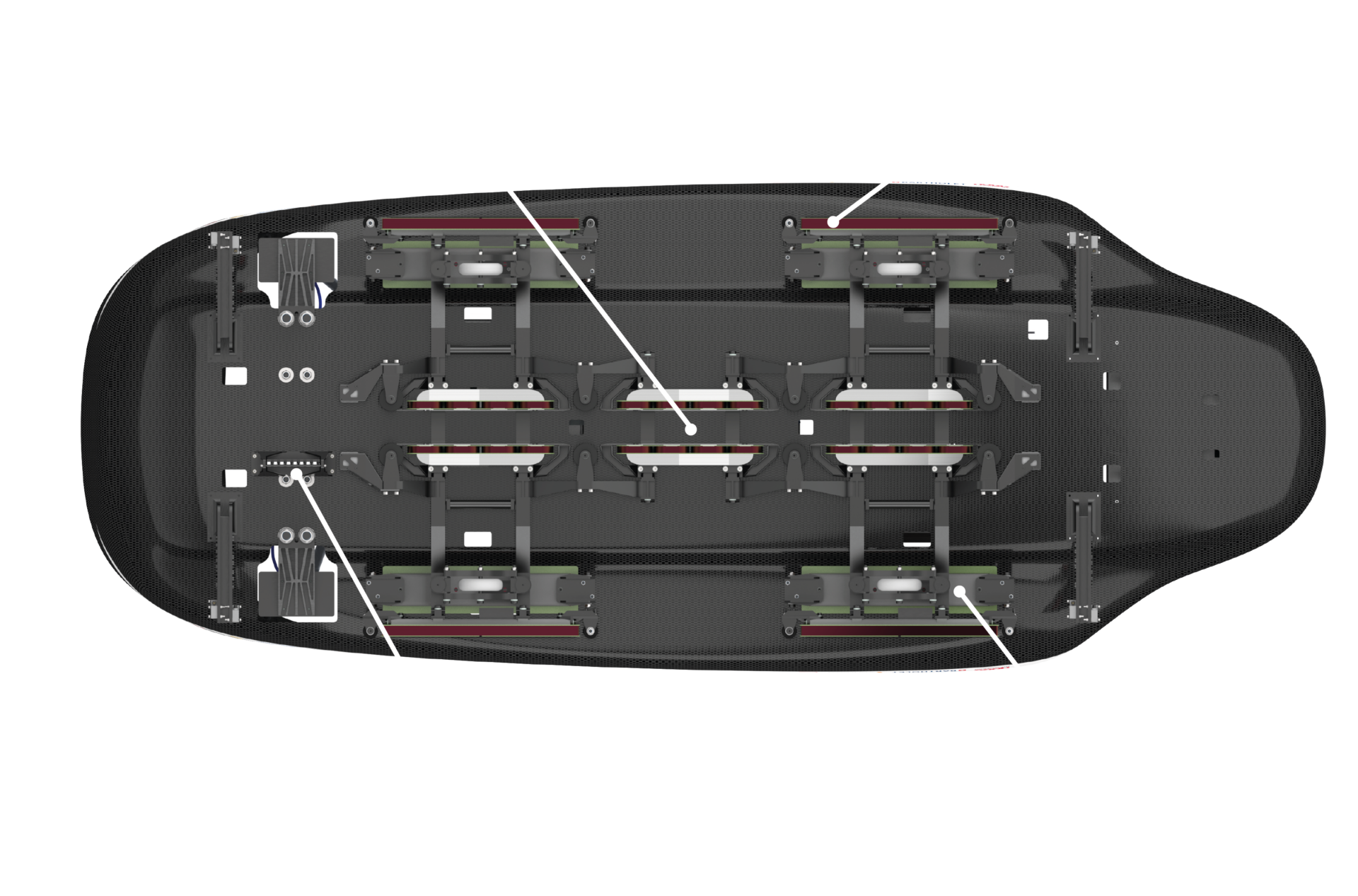
The linear switched reluctance motor (LSRM) accelerates the vehicle by switching a pulsed direct current through the coils of the motor. When this happens at the right position on the track, the pod is always attracted to the teeth further forward, resulting in continuous forward motion. The motor consists of 24 coils with a laminated core and is mounted on the underside of the monocoque to achieve a low center of gravity. The inverter is the link between the batteries and the LSRM and regulates the current through the motor.
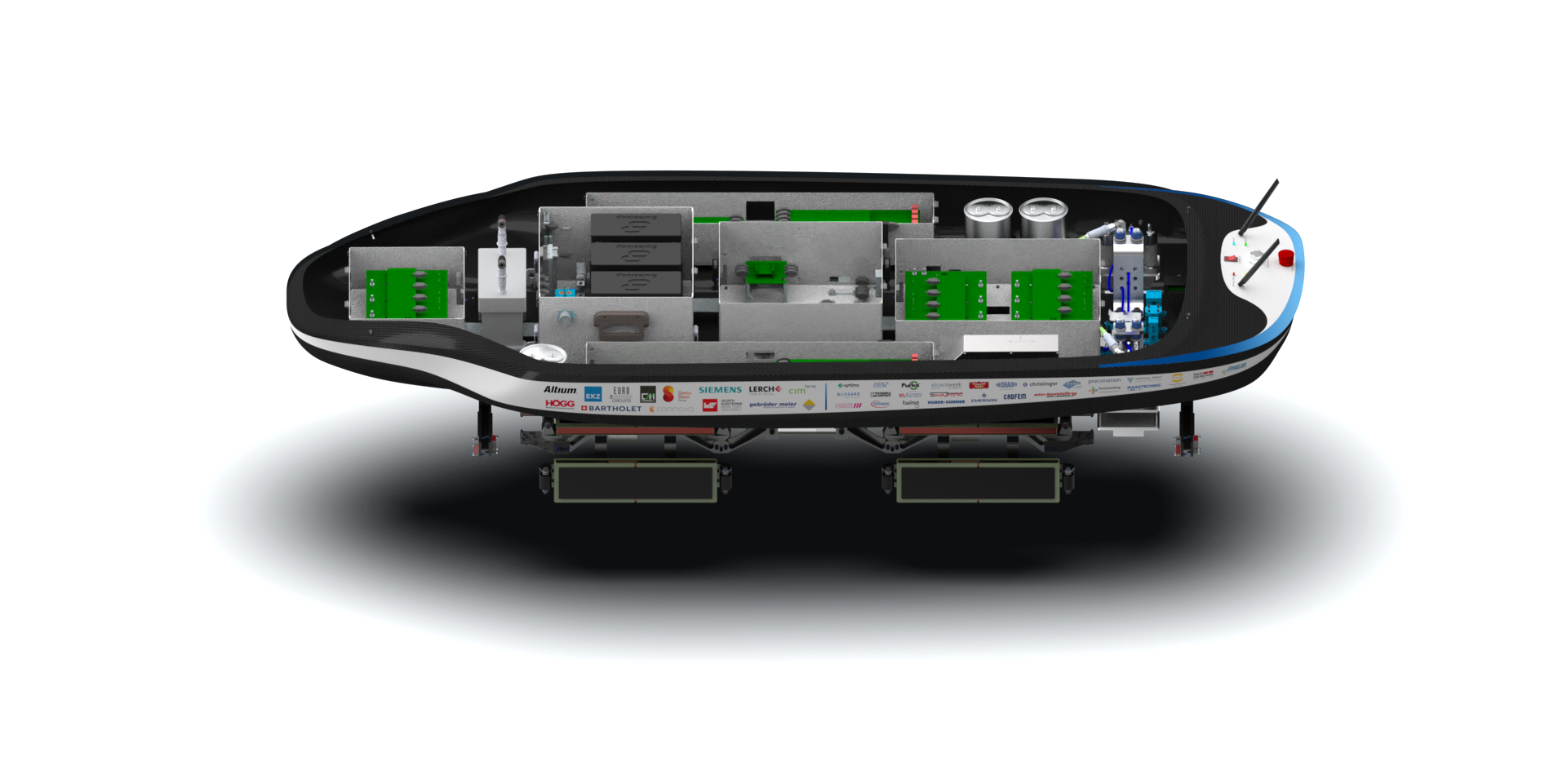
The electrical systems are largely divided into five high-voltage and one low-voltage box. The high-voltage boxes contain in total three power modules for the propulsion system and four power modules for the levitation and guidance system. Each propulsion inverter module controls two phases of the LSRM consisting of four serial coils each with currents up to 150 A leading to accelerations of up to 1.6g. Meanwhile, each guidance and levitation power module controls one electromagnetic suspension (EMS) for lateral stabilization and one hybrid electromagnetic suspension (HEMS) for vertical levitation. These coils are excited in the range of -20 A to 20 A and keep the vehicle within 3-9 mm and 5.5-16 mm distance to the track for the EMS respectively HEMS. All current controllers utilize a tolerance-band based architecture running on the FPGA, whereas the position and speed controller are running on STM32H7 microcontrollers.
The low-voltage box contains the vehicle, levitation inverter and propulsion inverter controls as well as the low-voltage power supply and is located in the middle of the pod. The batteries are integrated into one battery box in front of the low-voltage box. The entire battery system consists of up to 24 lithium-polymer battery packs and has a maximal voltage of 800 V. These box contains additional electronics, including the battery management system (BMS), which is responsible for monitoring each individual battery cell, and an isolation monitoring device (IMD) to ensure proper isolation of the different potentials.
Further, the vehicle controller is responsible for the digital integration of the pod. This includes collecting data from the other systems and determining the state of the overall vehicle via the various -sensors connected to one of the CAN-FD buses. The vehicle control system then takes action based on this collected data. It also establishes a wireless connection to the control software, from where manual control commands can be sent.
Mechanical
The pod-structure is completely reimagined as a carbon fiber monocoque. This innovative design ensures that all forces are guided through the vacuum-compatible carbon fiber sandwich structure as well as the aluminum skeleton beneath it. Weighing only 21 kg, the monocoque chassis with its lid offers exceptional aerodynamically performance and futuristic look. Notably, the pod features an advanced levitation and guidance system that provides both lateral and vertical stability. Enhancing safety measures, a new generation suspension system has been integrated to safeguard against levitation system failures and mitigate track misalignments. The system incorporates four wheels to restrict vertical movement of the pod, while numerous vertical and lateral guidance wheels act as initial contact points in all directions.
Safety is a paramount concern, and the pod’s brakes have been engineered to ensure reliable stopping power in all scenarios, capable of deceleration rates up to 2.1g. A pneumatic actuated braking mechanism generates the necessary braking force, and a redundant design guarantees the availability of ample braking force even in unforeseen circumstances. Disc springs, constantly compressed and capable of releasing without power or air supply, provide additional redundancy. Innovative energy recuperation capabilities are also a highlight of this prototype. The pod’s hardware includes a motor capable of regenerating energy, complementing the physical braking system. Additionally, next to the physical braking system, the electronics of the pod are capable of recuperating energy through its motor.
To address cooling requirements for the electrical components, a cutting-edge vacuum-compatible cooling unit has been implemented. This unit employs a self-designed water loop to efficiently transfer heat from the inverter and levitation units to a central phase change thermal storage. This revolutionary metal 3D-printed heat-battery employs tuned paraffin for storing substantial amounts of thermal energy. When the pod comes to a halt, the heat-battery can be easily exchanged manually, restoring optimal cooling performance.