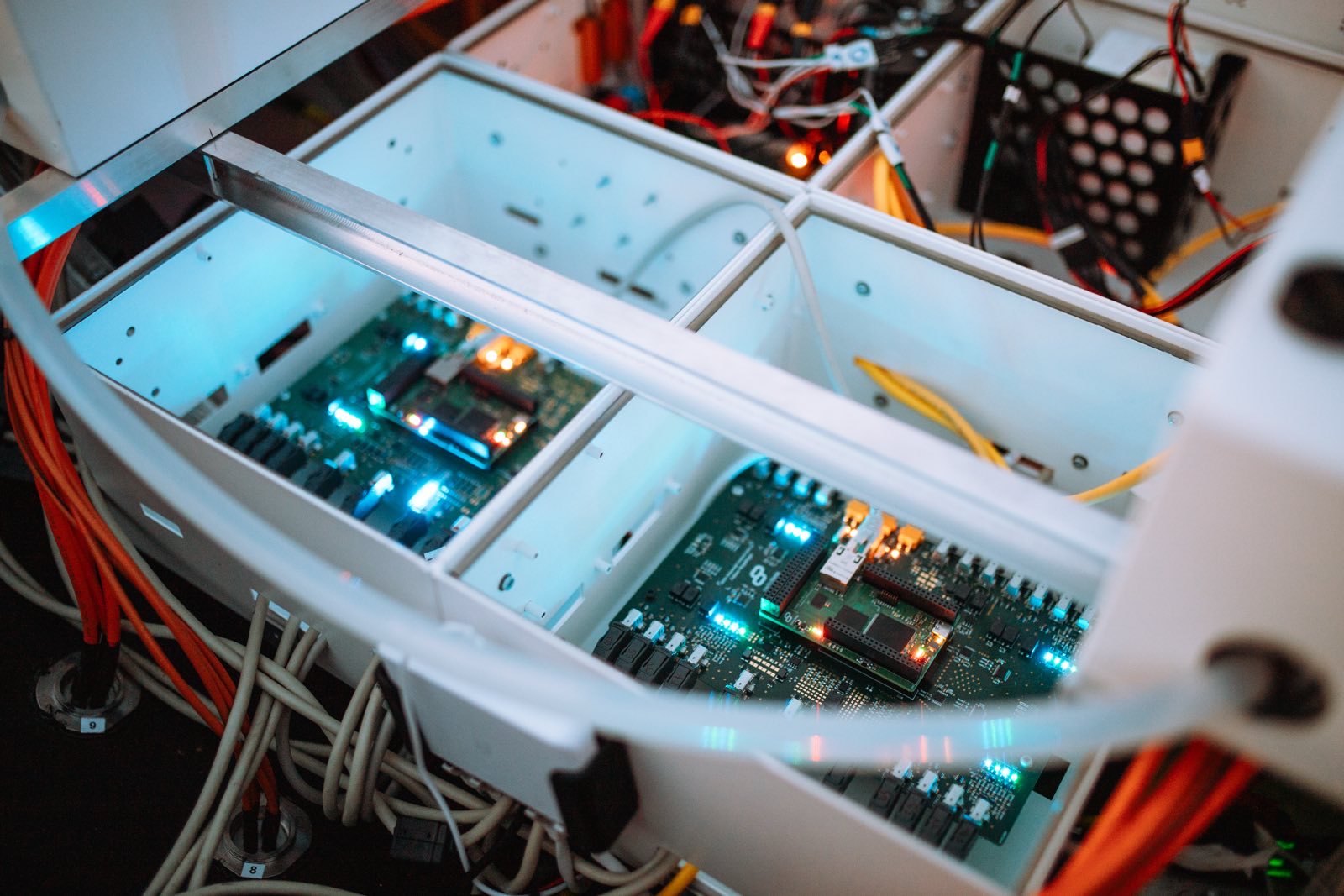
With Sarah Springman Swissloop further pushes the boundaries of hyperloop technology. Vacuum is one of the key pillars of the Hyperloop concept, hence a major focus of Sarah Springman has been on making the system fully vacuum-compatible. As the first student team in the world, Swissloop developed a hyperloop pod with a completely vacuum-sealed cabin. This cabin not only houses the electronics but also provides enough space for a passenger, including an easy entry and exit system thanks to a fast-closing and opening door.
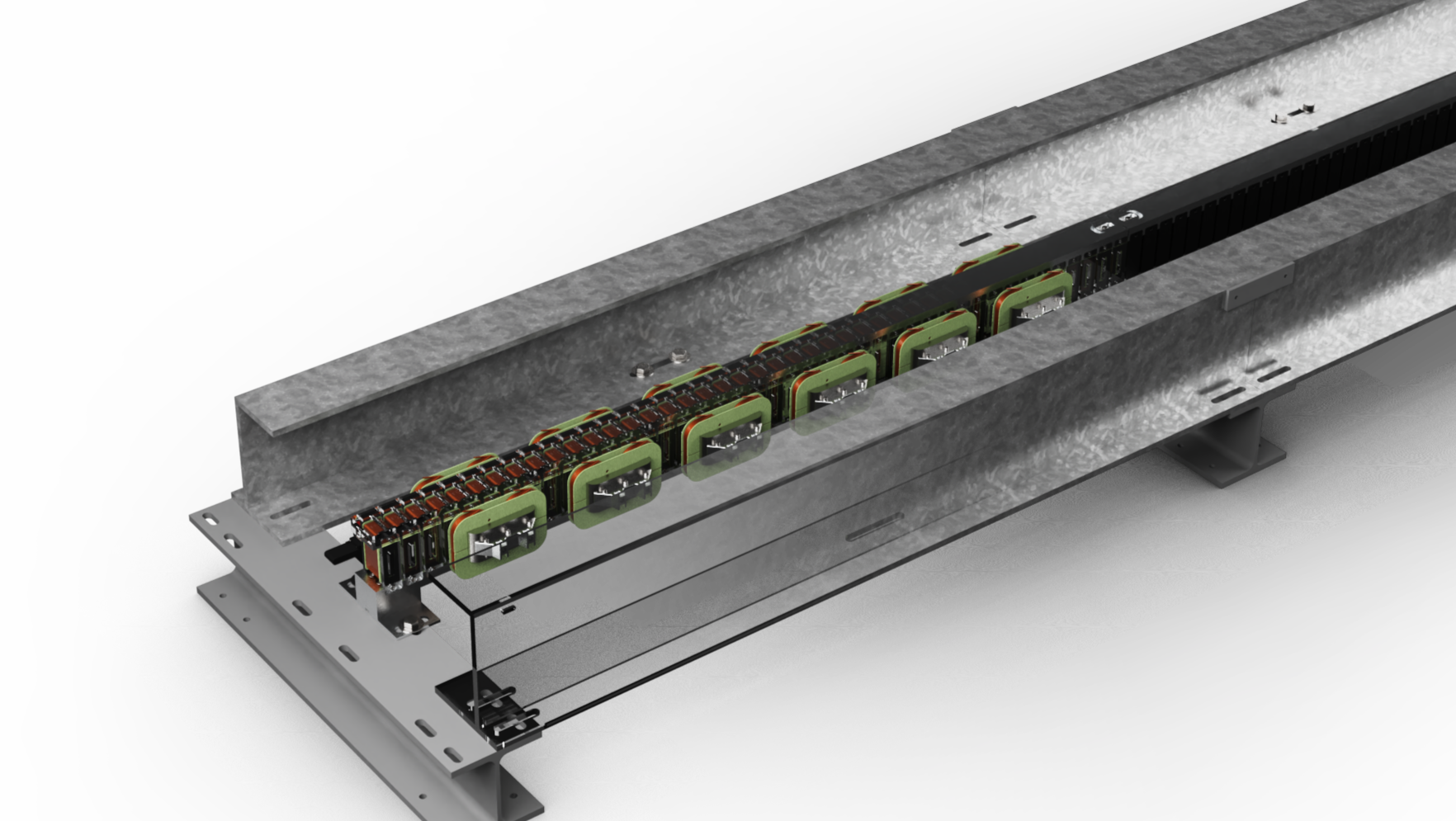
Further the Springman pod not only consists of an active pod but also of an active track called booster. The booster is designed to accelerate the pod to cruising speed. As a result, the newly developed motor of the pod could be optimized for maximum efficiency at cruising speed.
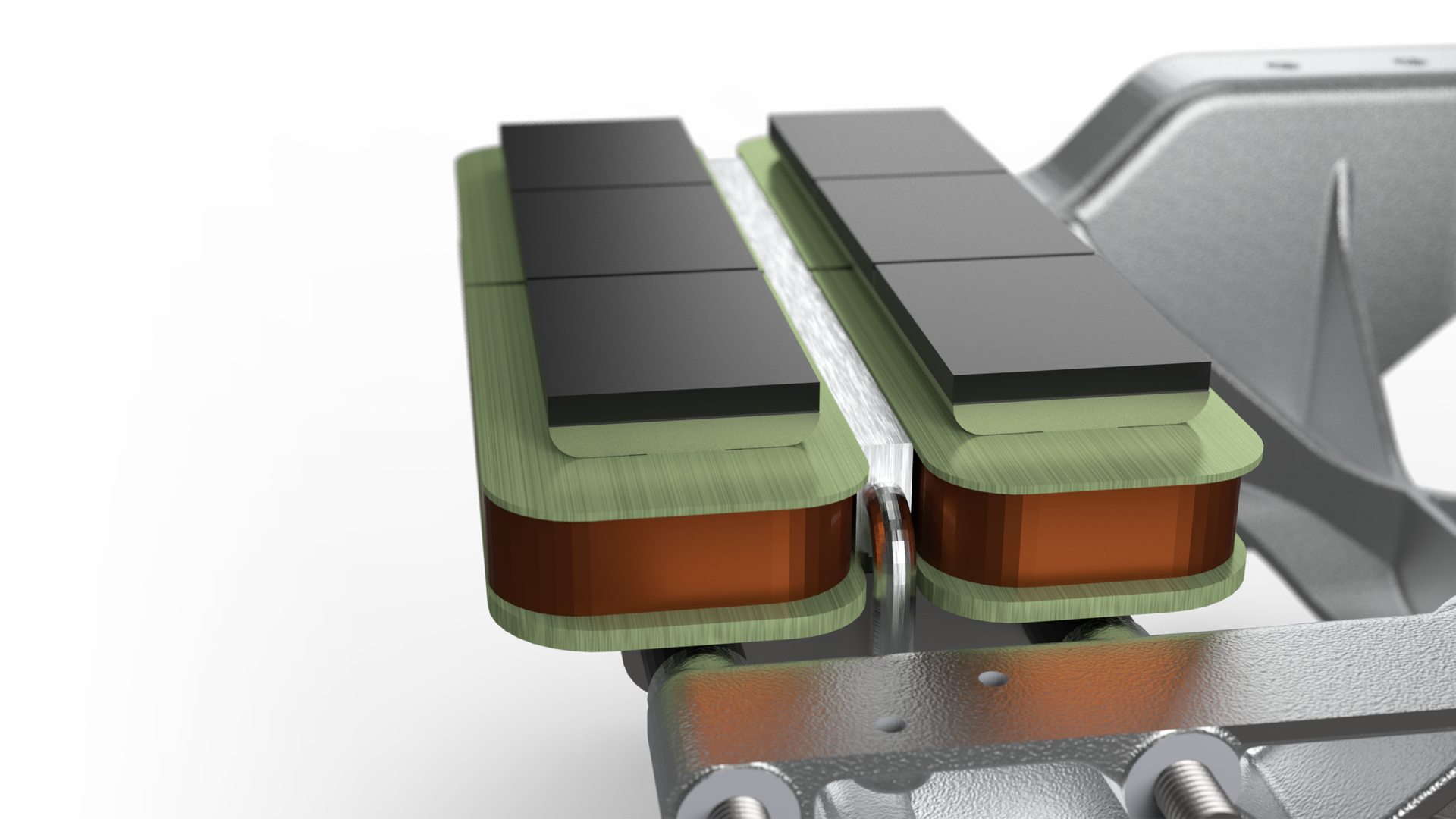
Sarah Springman again incorporates a combination of lateral electromagnetic suspension in combination with a vertical hybrid electromagnetic suspension, enabling incredibly efficient levitation.
Sarah Springman is the remarkable result of the combined efforts of a team comprising around 38 talented ETH Zurich students hailing from diverse backgrounds. Throughout an intense ten-month season, starting in September, a core group of sixteen exceptional electrical and mechanical engineers dedicated themselves to the design, manufacturing, assembly, and testing of this intricate prototype.